This process Addresses the Mechanical Disassembly of the Robot and does not address the Electronics. Accompany this Procedure is additional pictures that you can expand to see more details as needed. This Robot has IC's and Transistors and are of the earlier designs. Static discharge can damage the electronics. It is recommended that you have and use a Static grounding wrist strap.
1. Make sure the robot is shut off. Open the rear door and remove the battery retainer and the large 6 V 4 AH DC rechargeable battery and the two small AA battery's. Close the door.
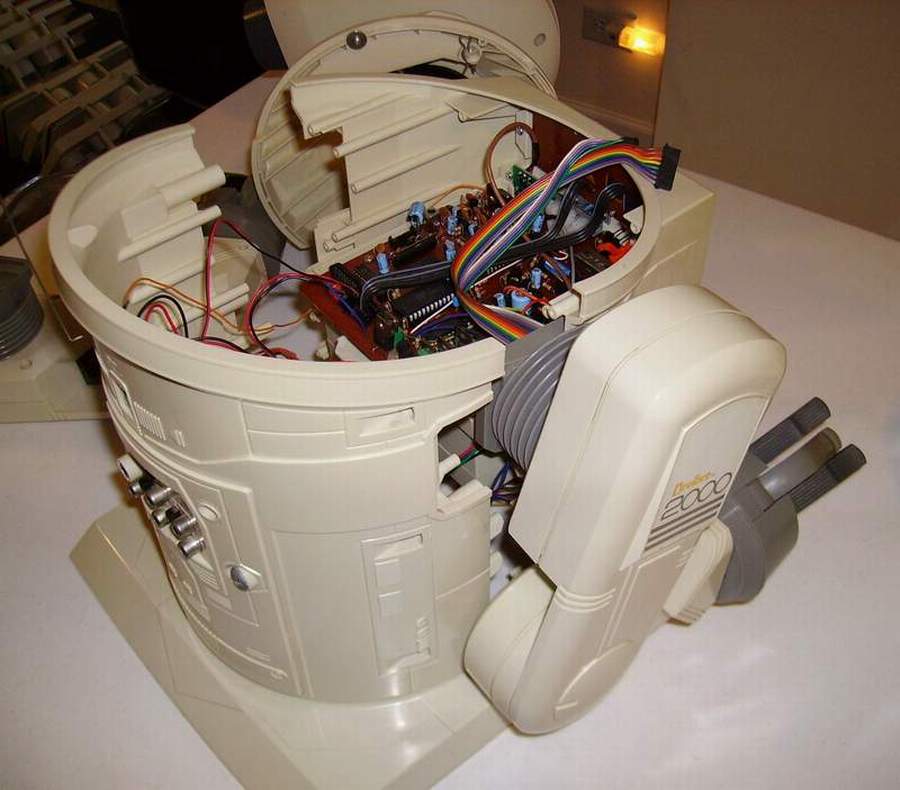
2. Turn the robot on to his back make sure that the head is free and not supporting the robot, then remove the six screws from the bottom of the robot keeping the base and housing together.
Keep these longer screws seperate to reinstall the base.
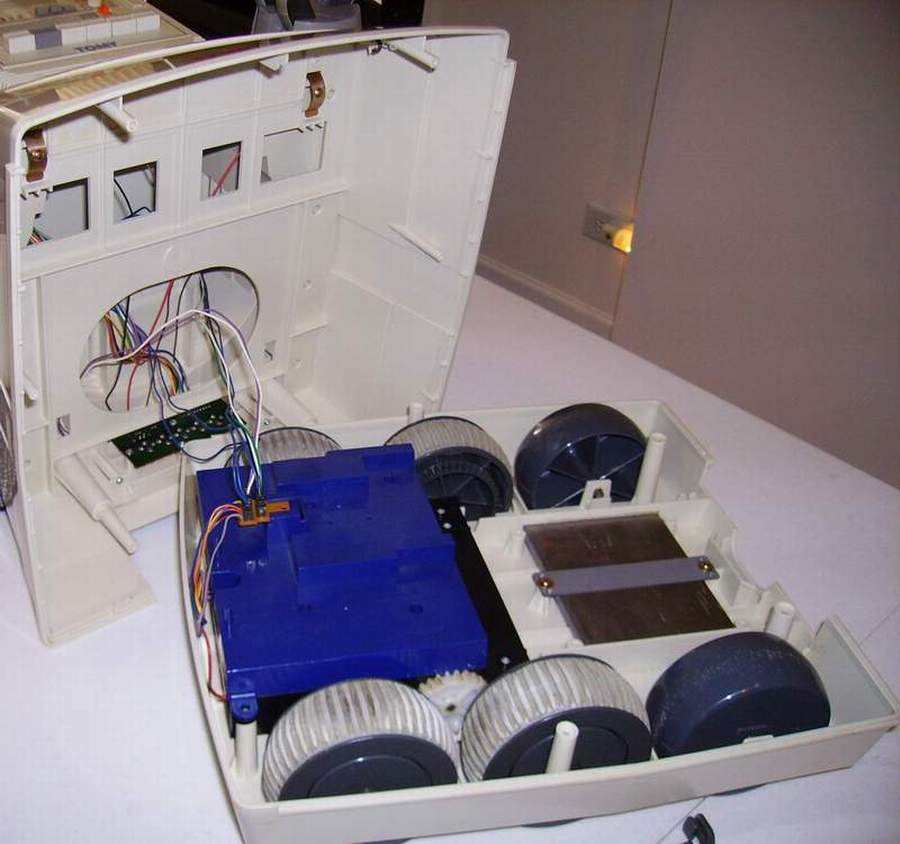
3. Separate the bottom base slowly from the housing and remove the draw from the robot.
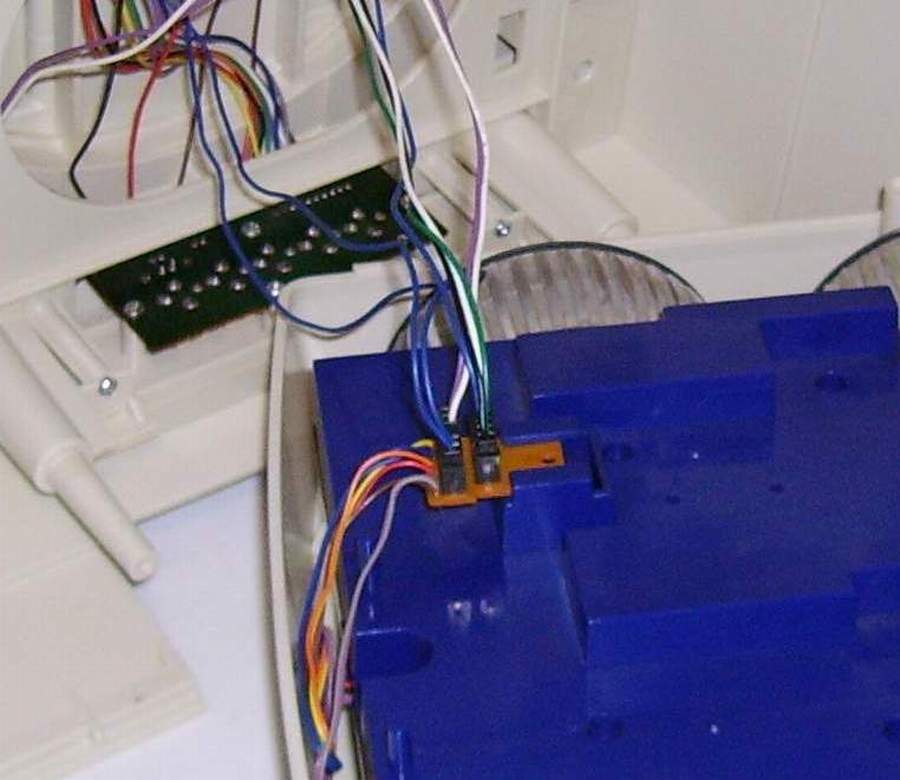
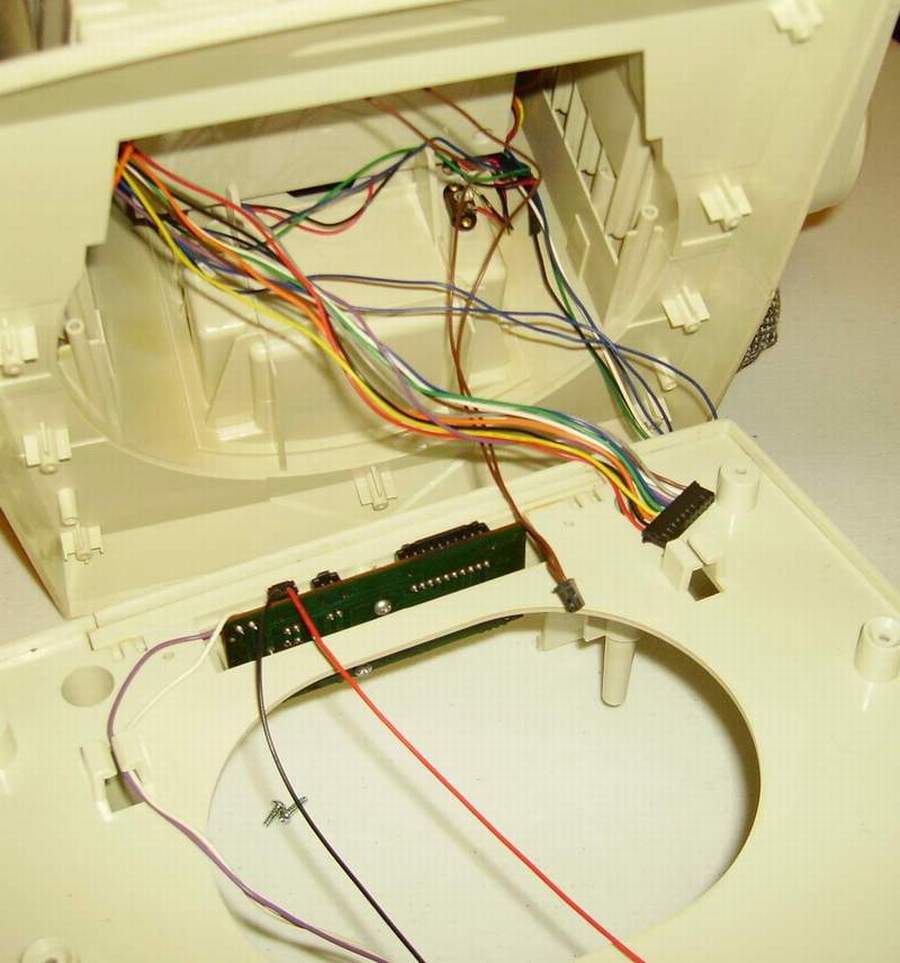
4. Turn the base and unplug the three plugs from the drive box that go to the robot. Make sure that you record where the plugs go.
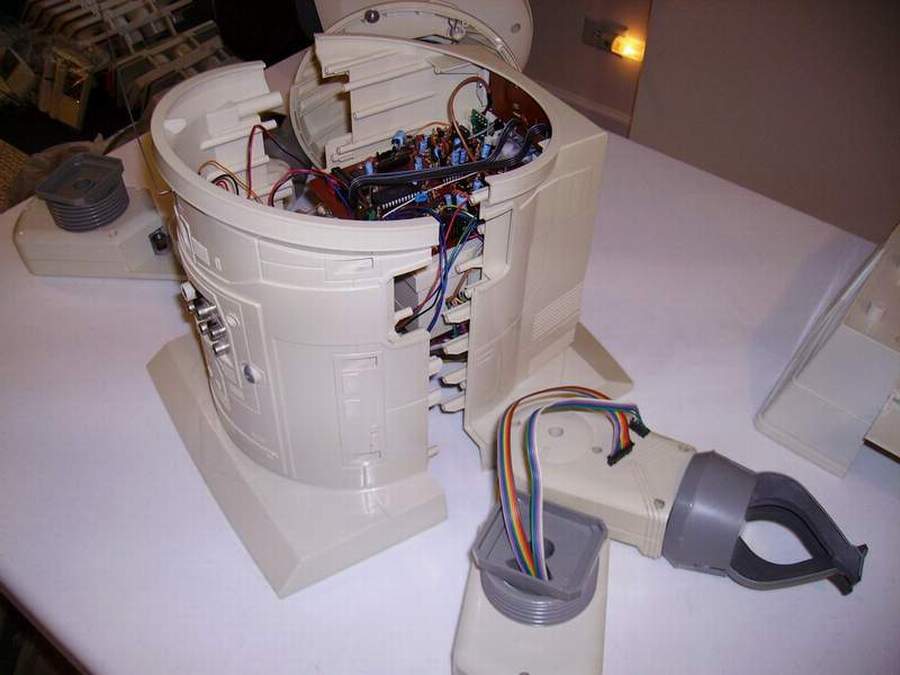
5. Remove the screws from the base housing of the robot. With wires still attached, seperate the base housing from the robot, turn it and lay it flat on the table. Do not try to remove it yet.
7. Remove the base housing from the robot.
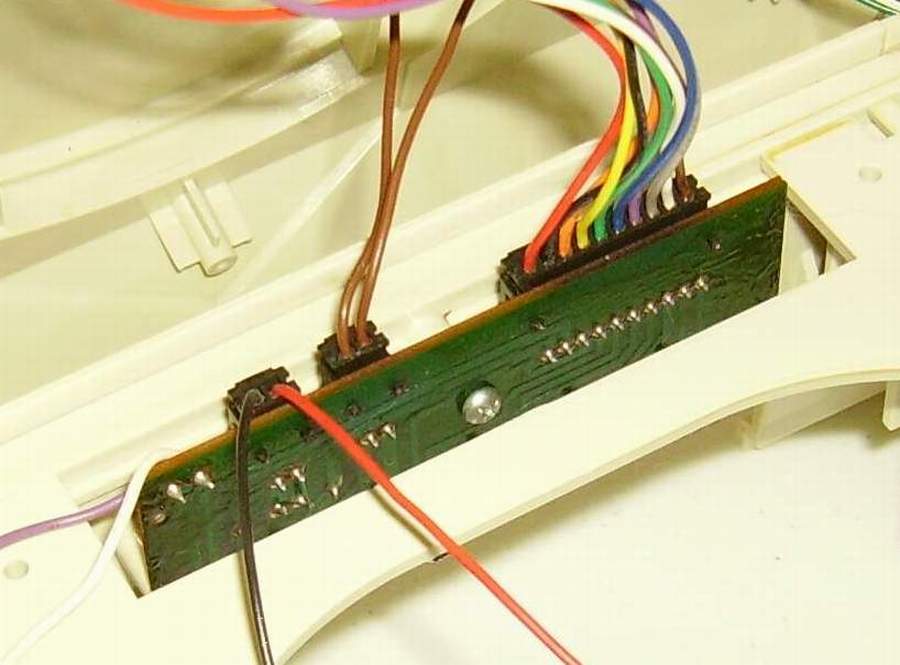
6. Leave the wires for the tray and remove the wires and plugs that go to the external Jacks board on the base housing from the robot.
* ( ANTENNA - If your robot has a base antenna you have to detach it at this stage.)
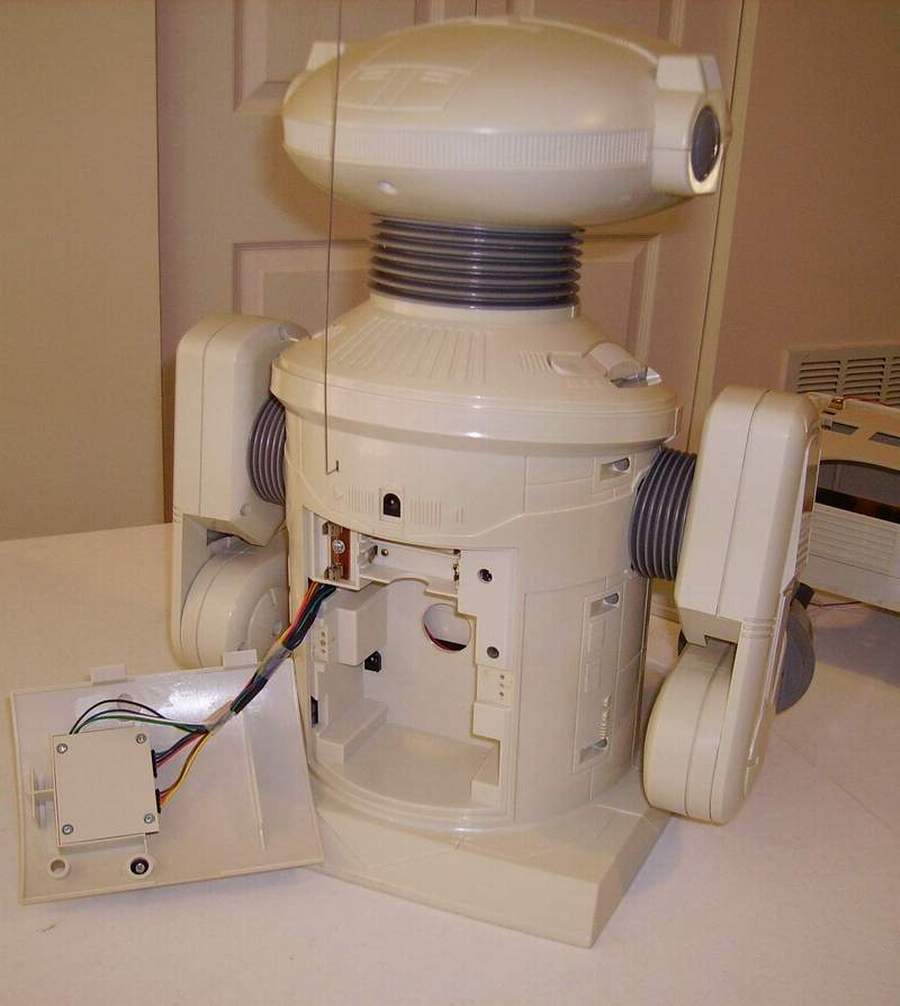
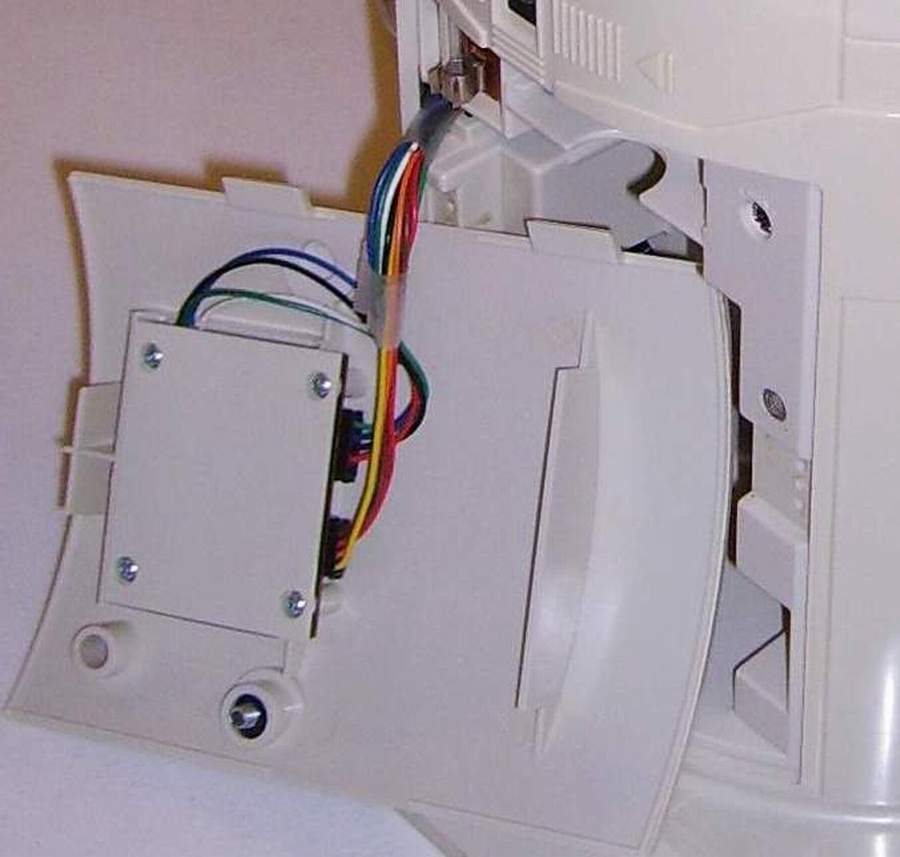
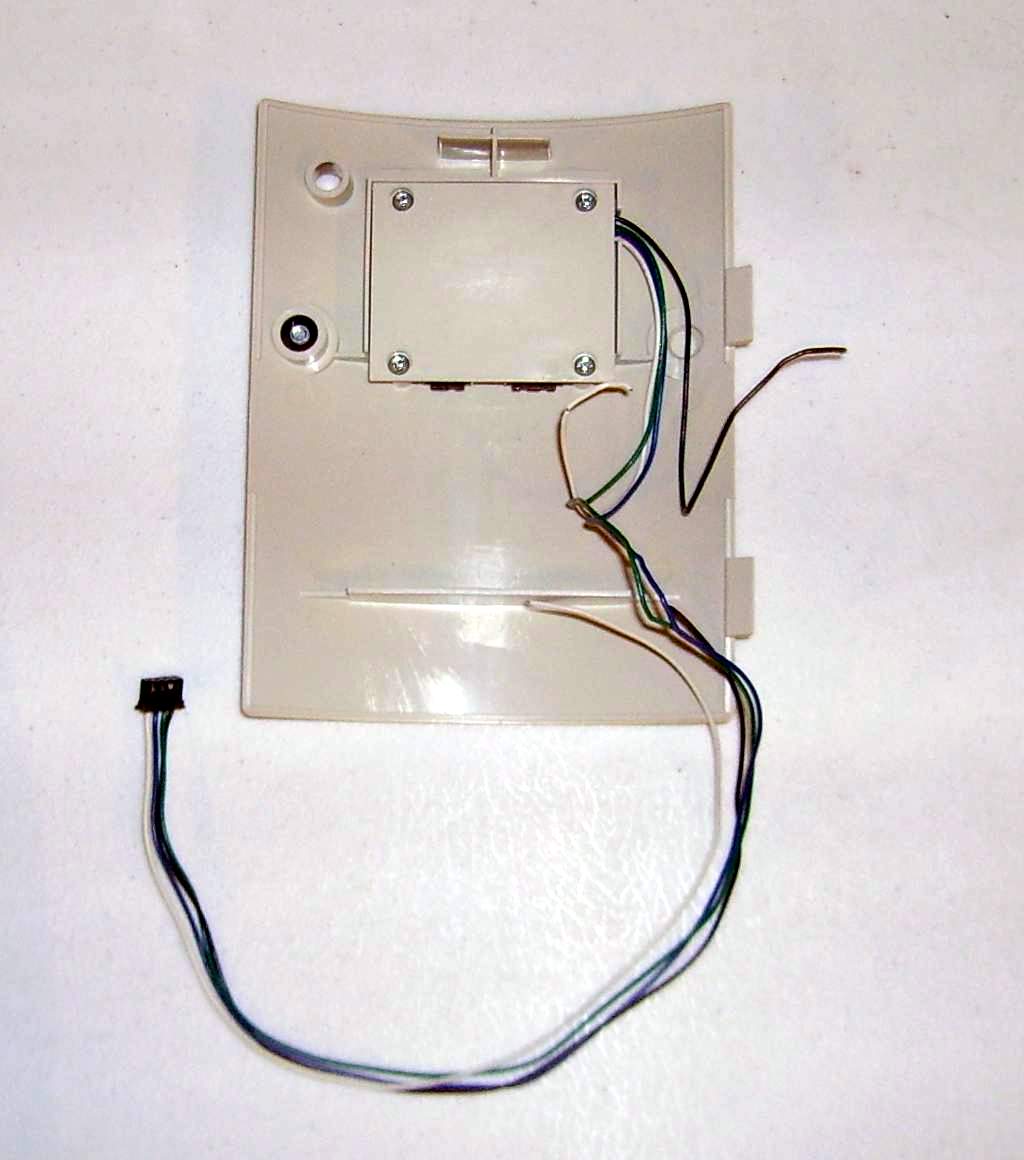
8. Open the rear door and remove the two plugs from the accessories interface board on the door. These two plugs and harness will have to be pushed into the robot. Close the door.
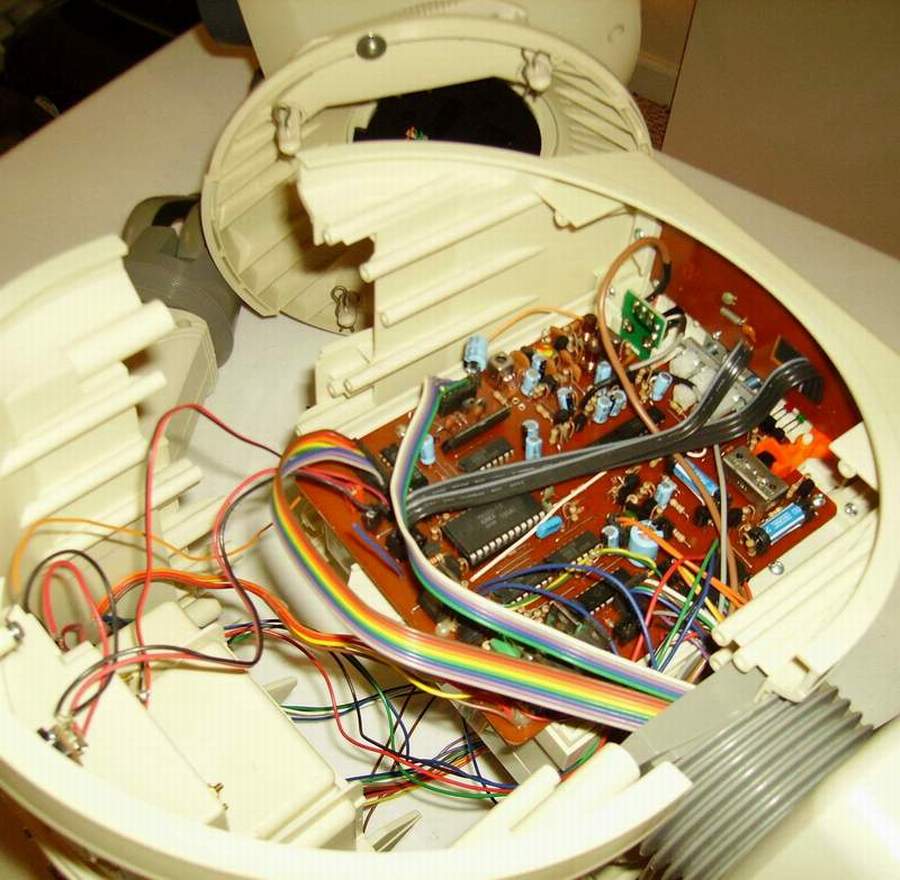
9. Remove the six screws from the back of the robot, and spread it apart slowly and very little (1 inch). (BE CAREFUL)
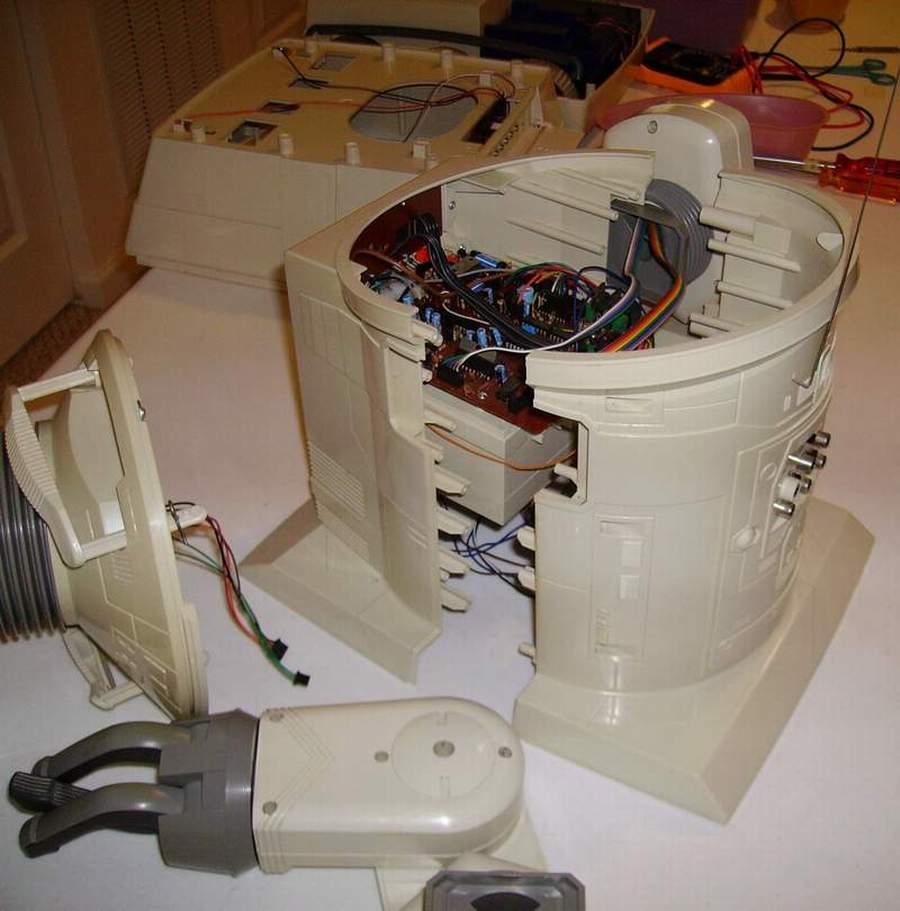
10. Spread the body apart just far enough to remove the left arm, put it down, and lift the head out. The robot back is still attached to the front by the wiring and the right arm can slip out and fall (BE CAREFUL)
11. Un-plug the head from the circuit board, two plugs, and put the head down.
12. Un-plug the right arm cables from the circuit board, two cables and plugs.
13. Remove the right arm from the body and put it down.
* ( ANTENNA - If your robot has a back antenna you have to detach it at this stage.)
14. The robot back is still attached to the front. You have to un-plug the front housing from the back housing by disconnecting the remaining wires. Take special care in disconnecting the clock wires for these are push in connectors and it is easy to damage them.
15. Push the one plug and harness to the outside of the robot. Push the other two plugs and harness to the inside of the robot. With all of the plugs and harness clear from the rear door, remove the rear door.
Failure in properly remove the wires can result in damage to the connector and it will have to be replaced.
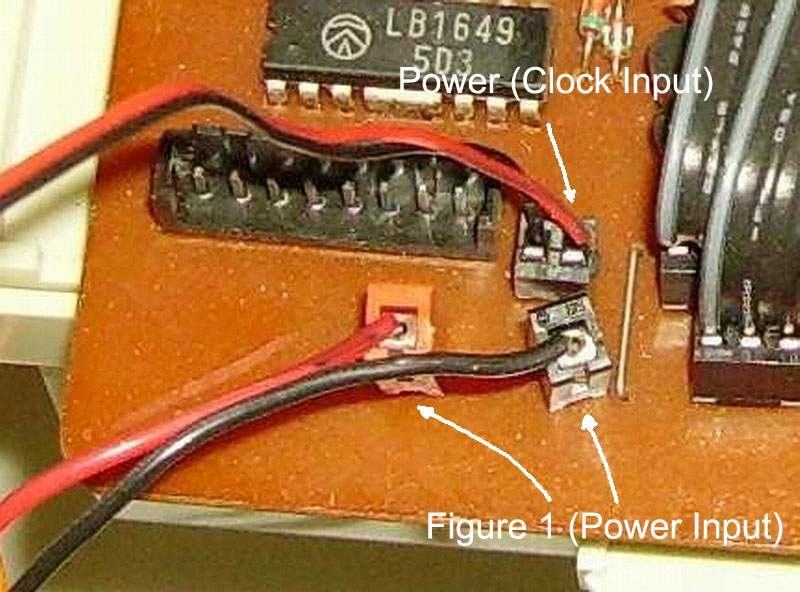
The following figures are pictures of the connectors in the robot.
14a. The following connectors has some unique problems. The power input socket must be raised to remove the wire. (Failure to raise the connector to unlock it will result in damage to the connector and it will have to be replaced.)
1. Raise the Red/Black input sockets.( The socket will raise about 1/4" ) Do not force it. 2. Remove the wires.
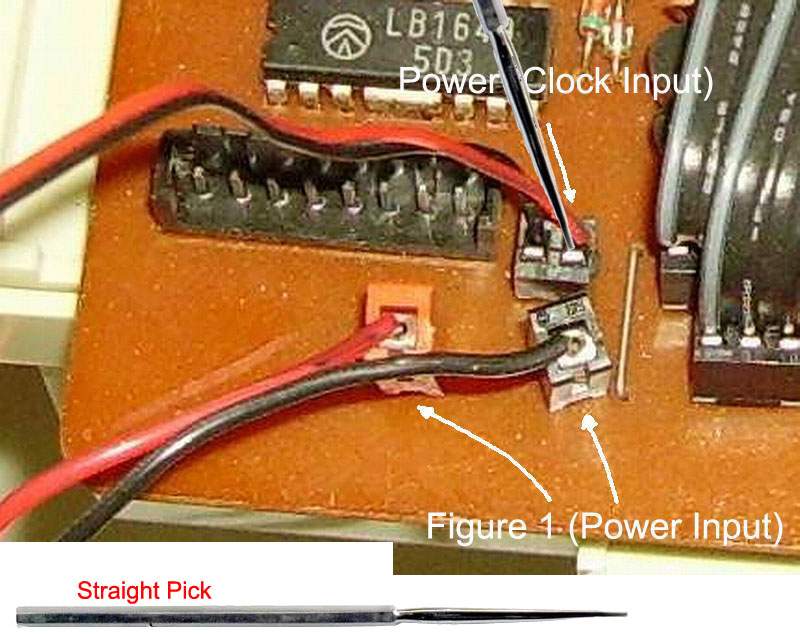
14b. The clock power input wires connector is a (one way, one time) wire push-in connector. There is a way to unlock the connector, but failure will result in in damage to the connector and it will have to be replaced.
There is a 80% chance that this will work depending on how gentle and accurate you are, and the connector itself. (Yes eight out of ten times I have been successful, but remember the other 20%) You will also need a Dental pick to remove the wires from the socket.
1. Insert the dental pick next to the wire and gently (very little pressure) press the wire down a touch, and rotating the wire gently pull it out. You might have to do this more than once but do not jam the dental pick in the socket. This will bend the contact and destroy the socket. 2. Repeat the process on the other wire.
14c. The other connectors have normal plugs and sockets that are keyed. Remember how they are positioned and record it for you will have to assemble the robot later.
16. Separate the back housing from the front housing.
17. You have now disassembled the major components of the robot. Disassembly of the components will be addressed seperately. To reassemble the robot reverse the procedure.
Randi Rain - https://youtu.be/lXtt8JsWYIs
Following is full size pictures of what is contained in this document, plus more information for a more detail understanding and view.
Omnibot 2000 ® - 5405 By Tomy ® Parts
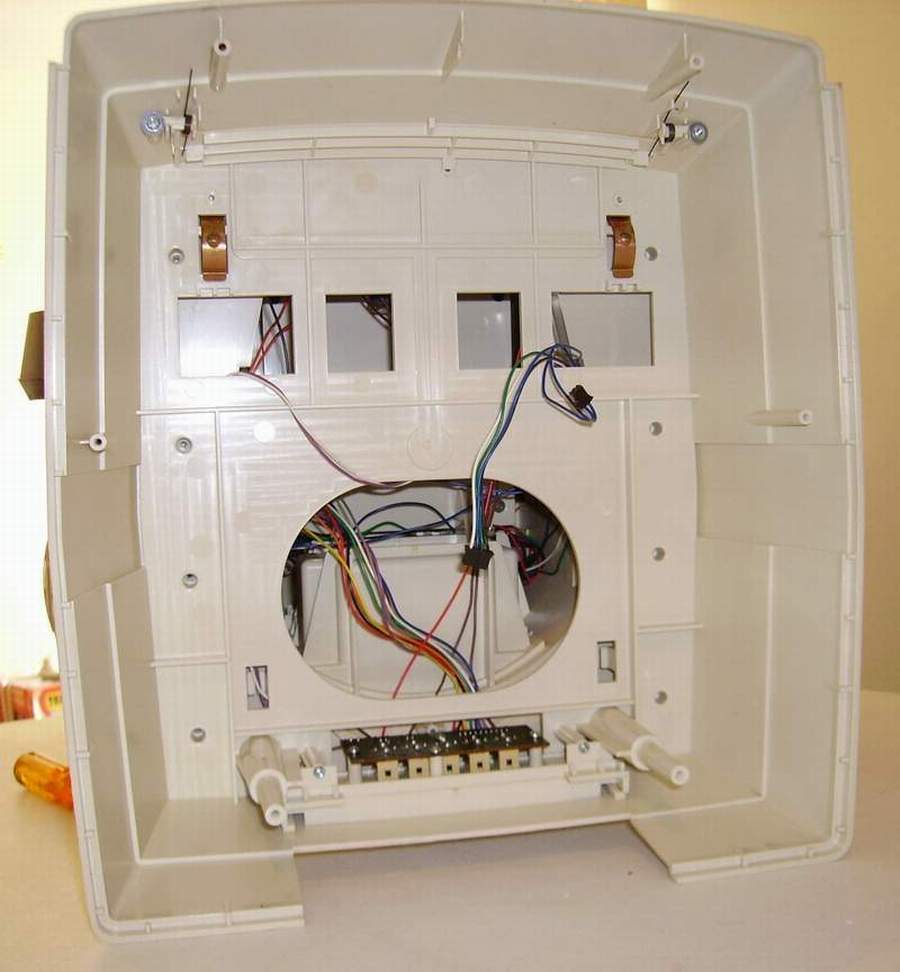
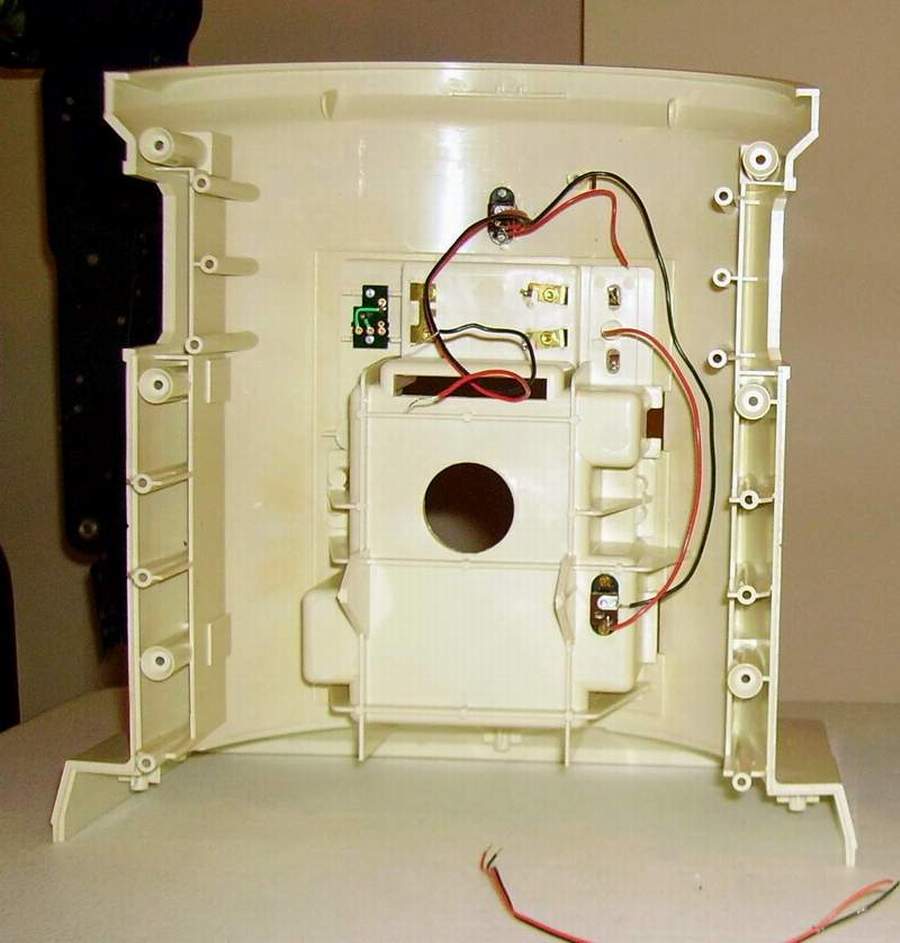
Back - Inside
Back - Outside
Front - Inside
Front - Outside
Robot - Base
Base with Draw
Base - Outside
Base - Outside
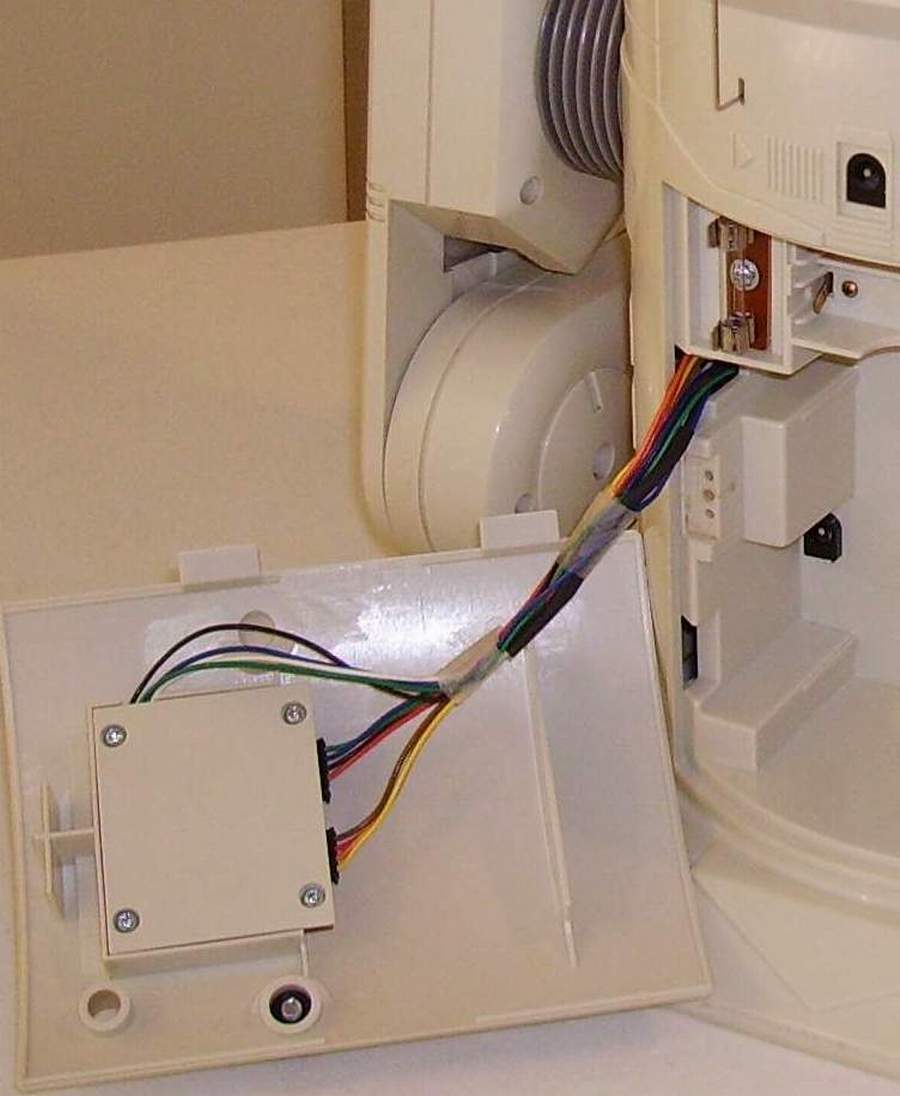
Base Extension - Plugs In
Base Extension - Plugs Out
Robot Base Extension / Without Trey
FYI - Shown is the robot without the trey to show you the robot looks like with and without the trey.
Robot Base Extension / With Trey
FYI - Shown is the robot with the trey attached to show you what the trey looks like inserted into the robot.
Base Extension Housing - Rear
Base Extension Housing - Front
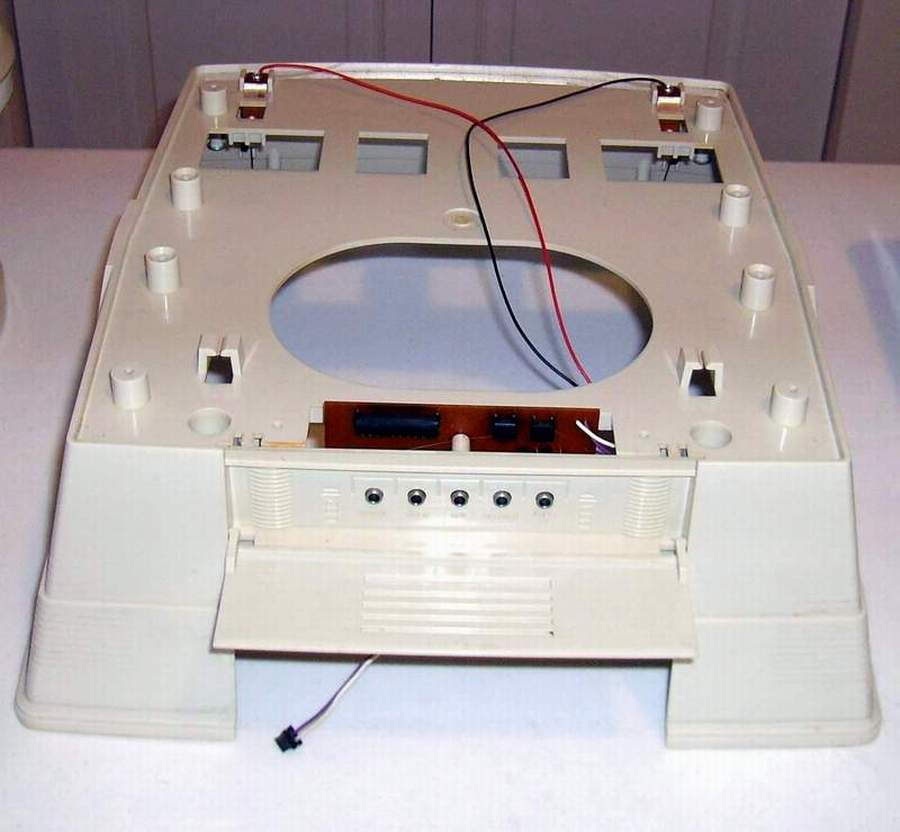
Base with Draw - Inside
Base - Outside
Left Arm
Right Arm With Electronics
Head
Robot Rear With Door Open
Battery Compartment
Battery Compartment Door
Power Distribution Board
Power Train Plugs
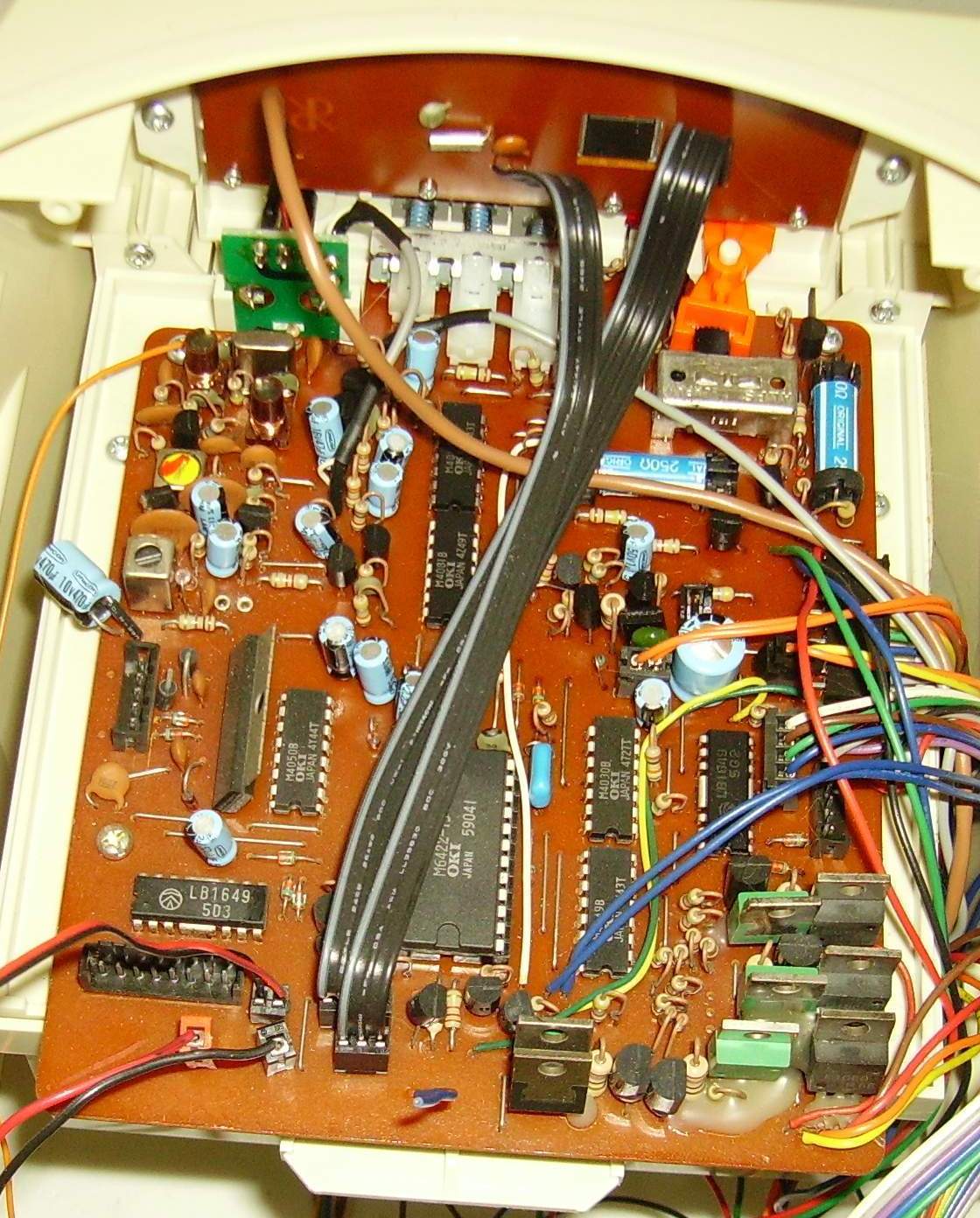
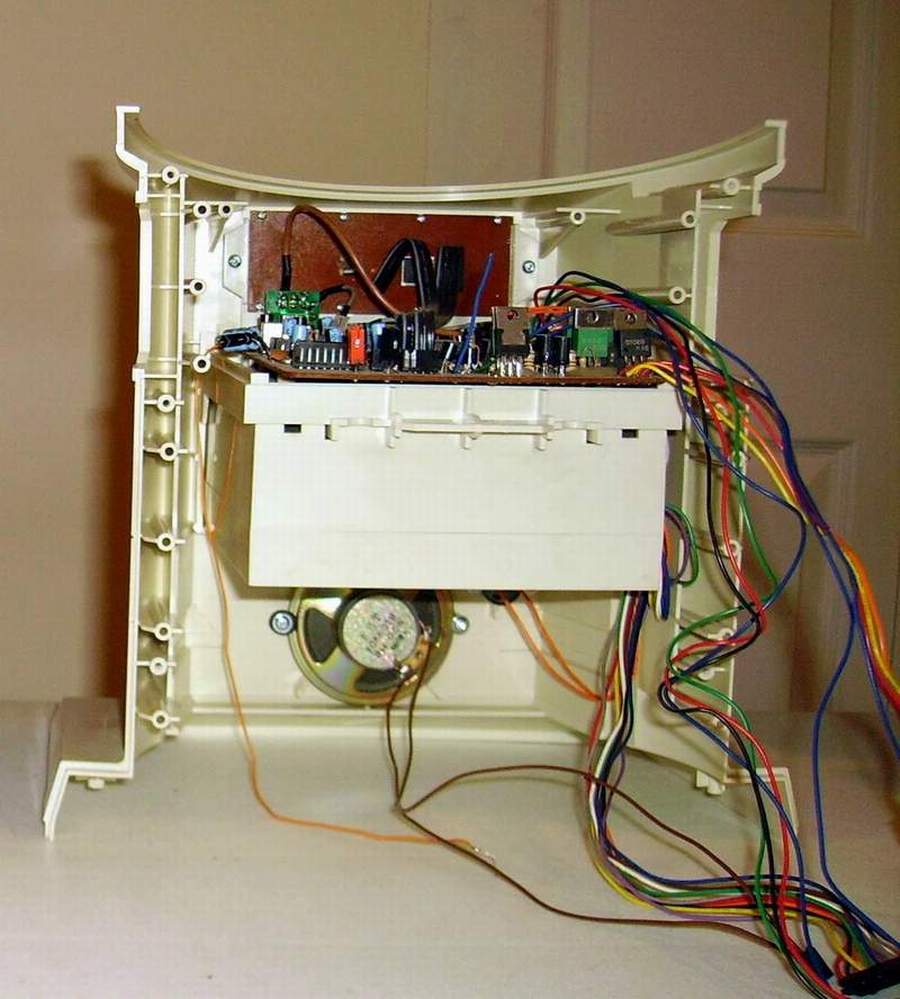
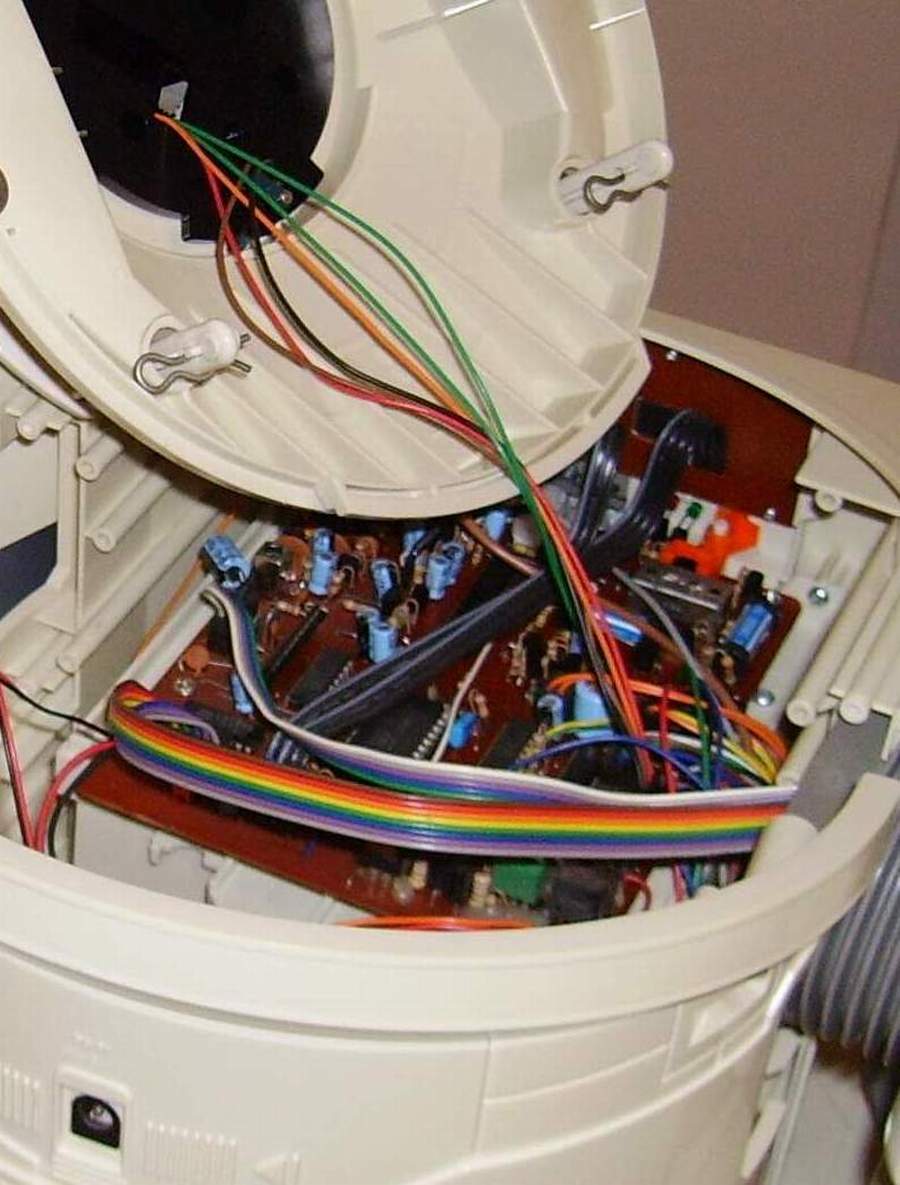
Circuit Board With Power
Right Arm Power Connectors
Robot Parts
Robot Parts
There is no warranty expressed or implied with this procedure. By using any information from this web site, you agree not to hold responsible this site, me, nor any of its representatives, for any injuries and/or damages, both physical and/or psychological, that may arise from the use and/or misuse of anything derived from this site. The user further agrees that such information/pictures does not constitute any guarantee of accuracy, safety or reliability, and that cannot be held responsible for any way. The user agrees to proceed at their own risk.