MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |
MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |
MicroGrasp Robotic Arm
Click to Enlarge |

MicroGrasp Robotic Arm
Click to Enlarge |
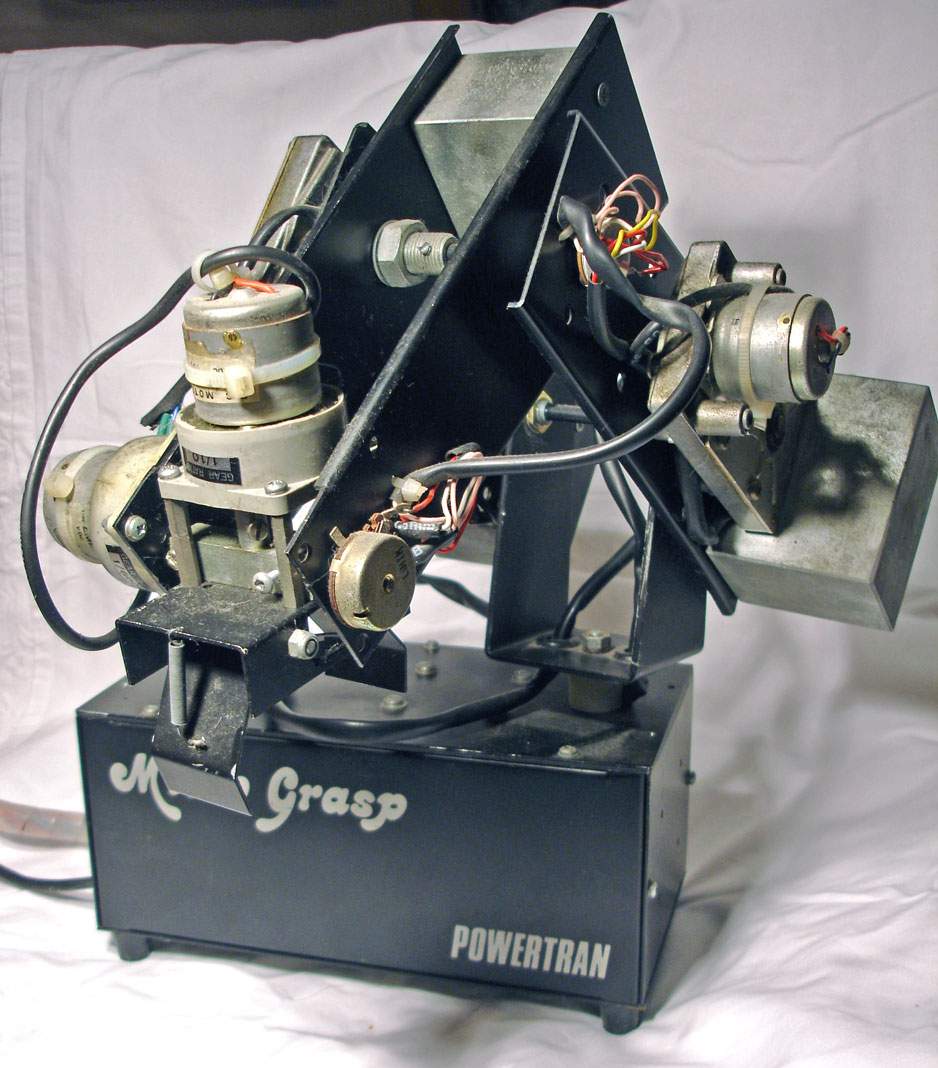
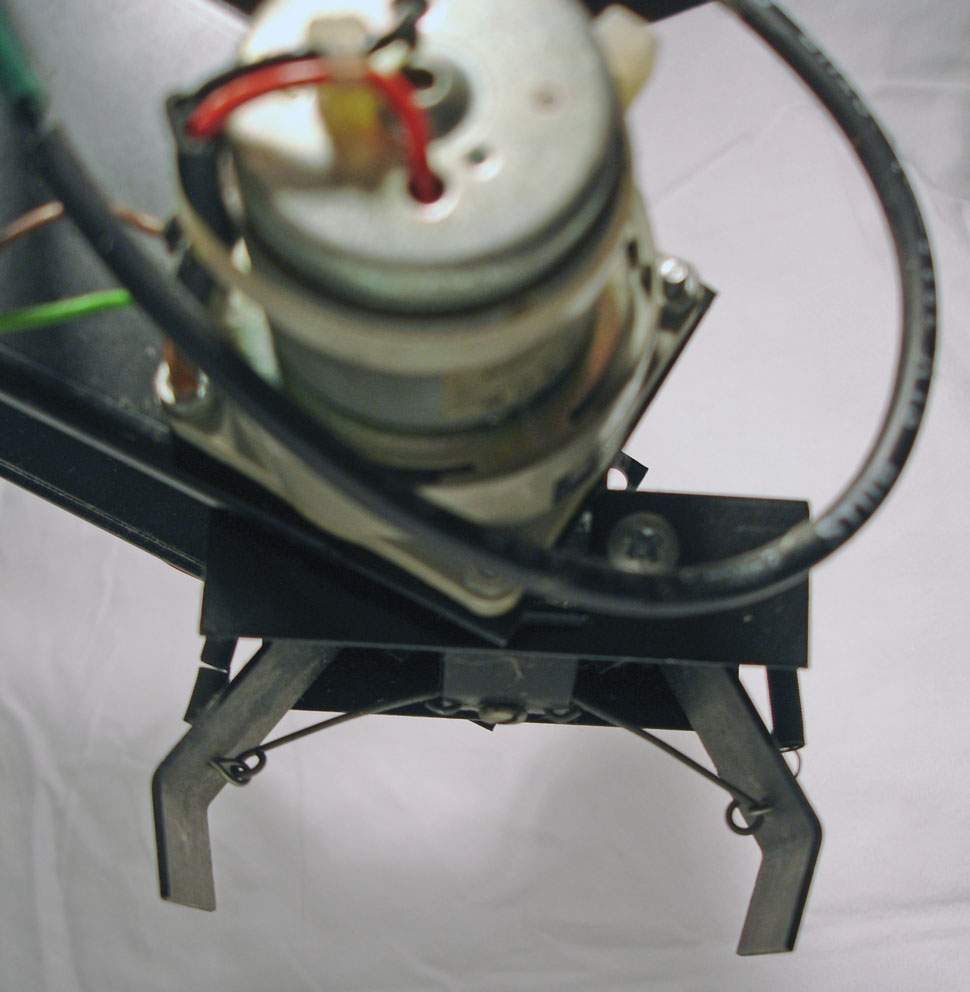
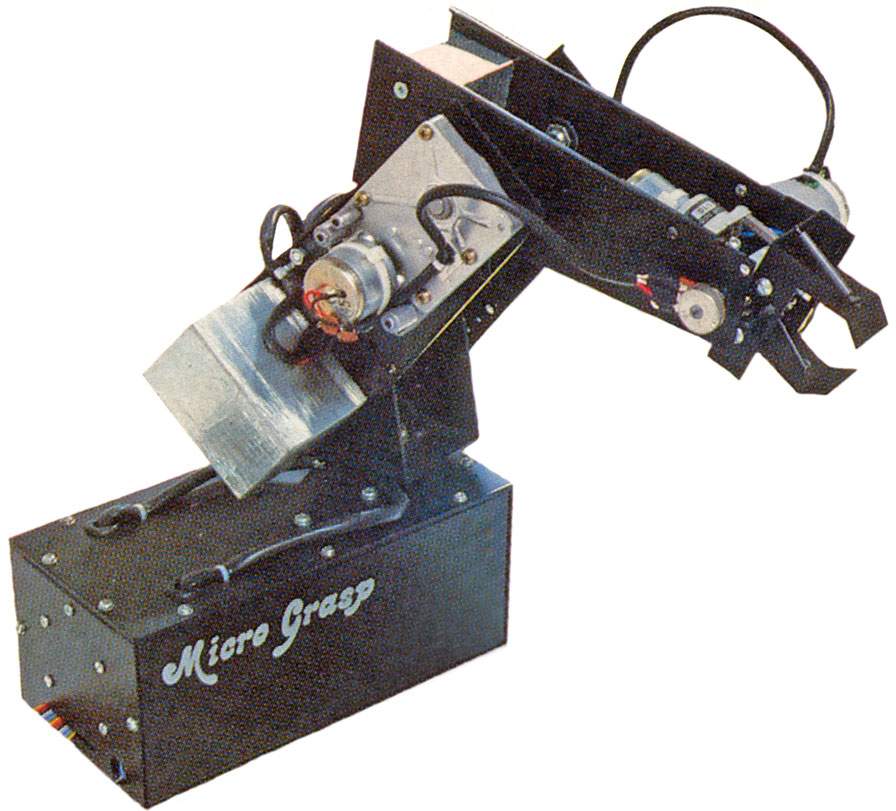
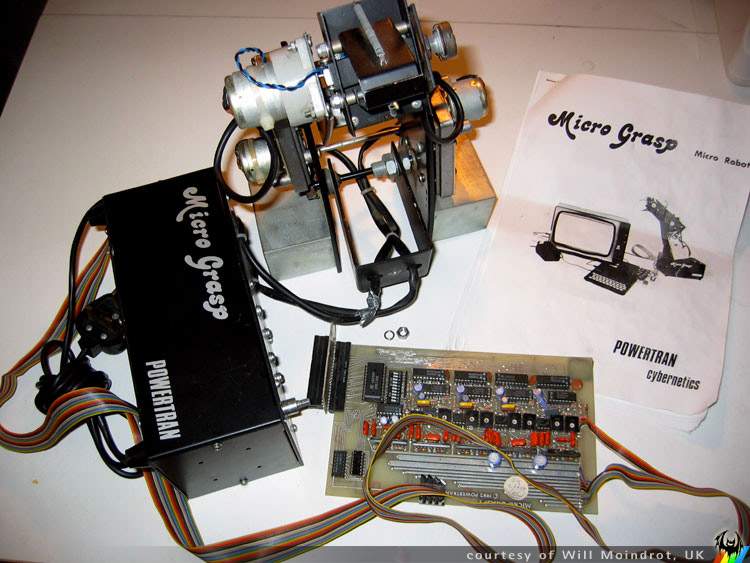
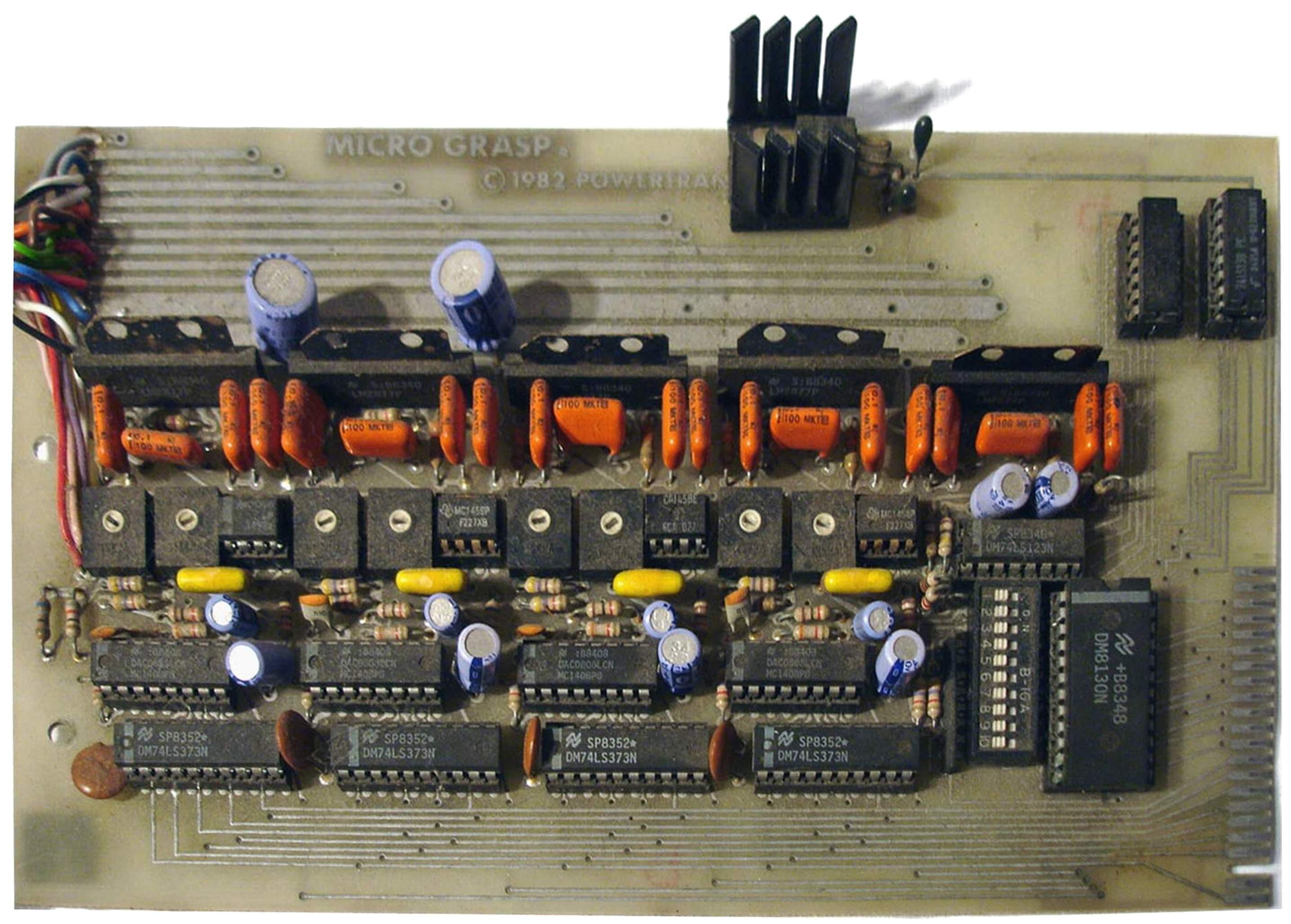
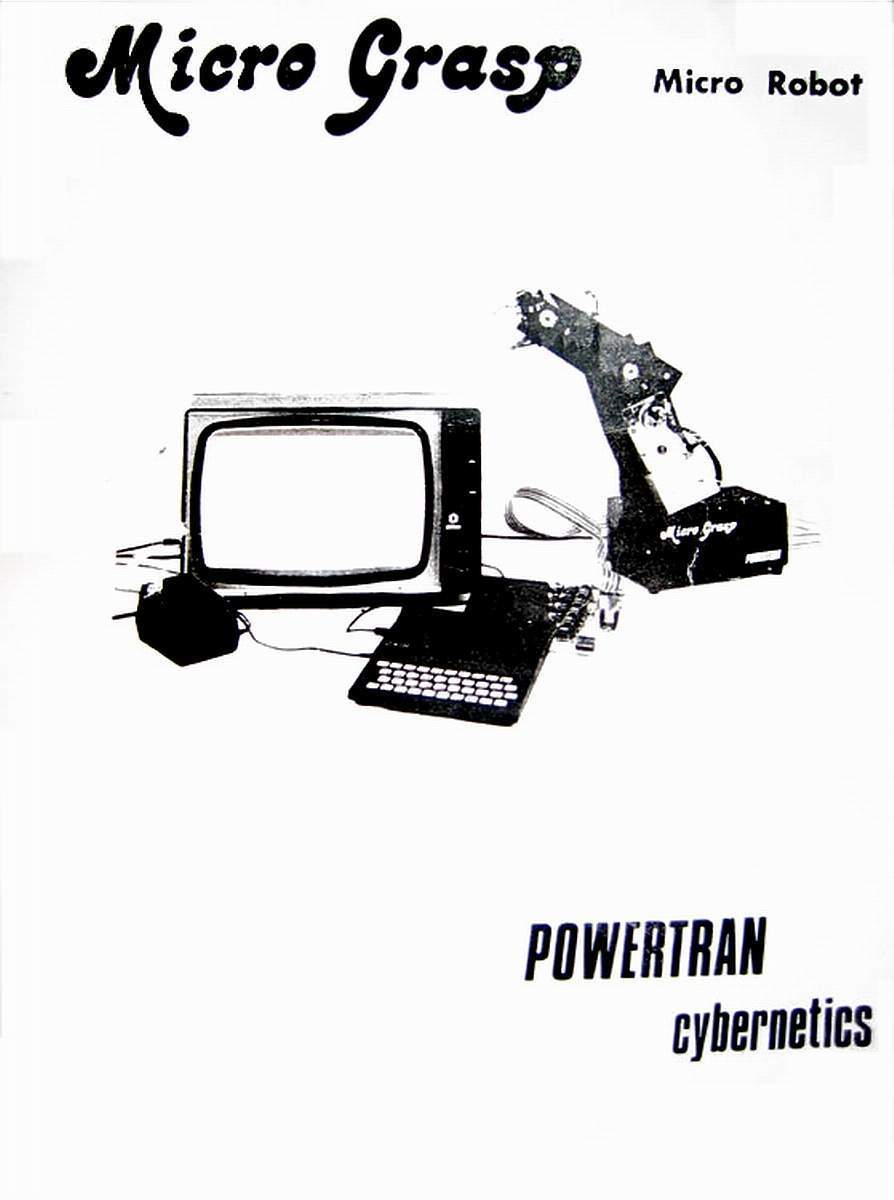
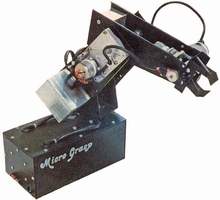
| MicroGrasp Robotic Arm by Powertran Cybernetics - Micro Grasp was designed by Richard Becker to fill the vacuum at the lower end of the Powertran Cybernetics in 1982, at a price range by appealing to cash-strapped schools and robot enthusiasts alike. It offered 3-axis, closed-loop, servo-motor control, with a built-in power supply and a 'universal' interface that could be tailored to suit most 8-bit micros of the day. |

Source: internet, International Hobbyist Collection - Updated 02-14-2020
|