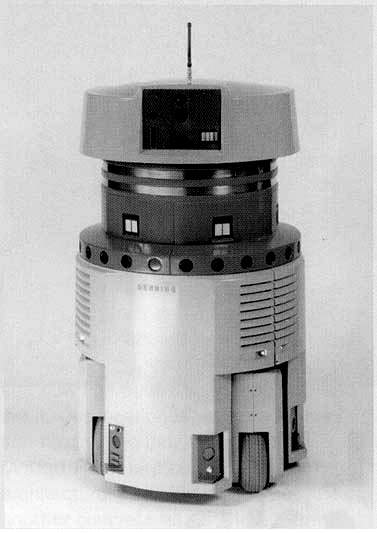
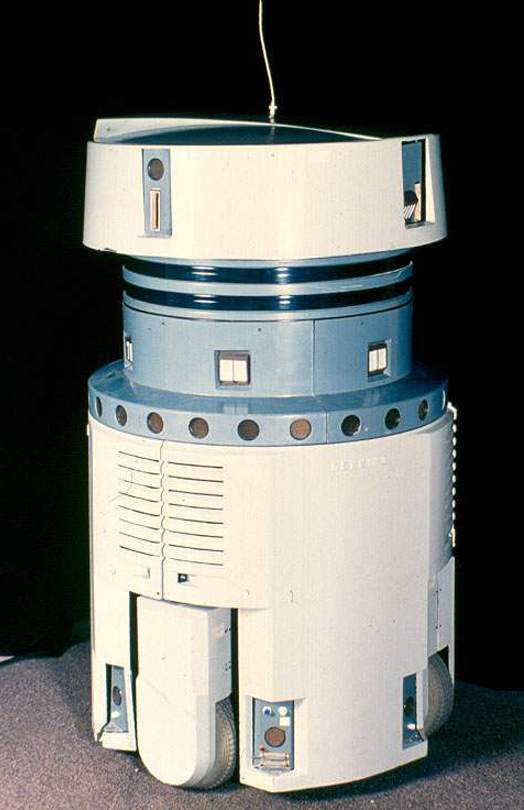
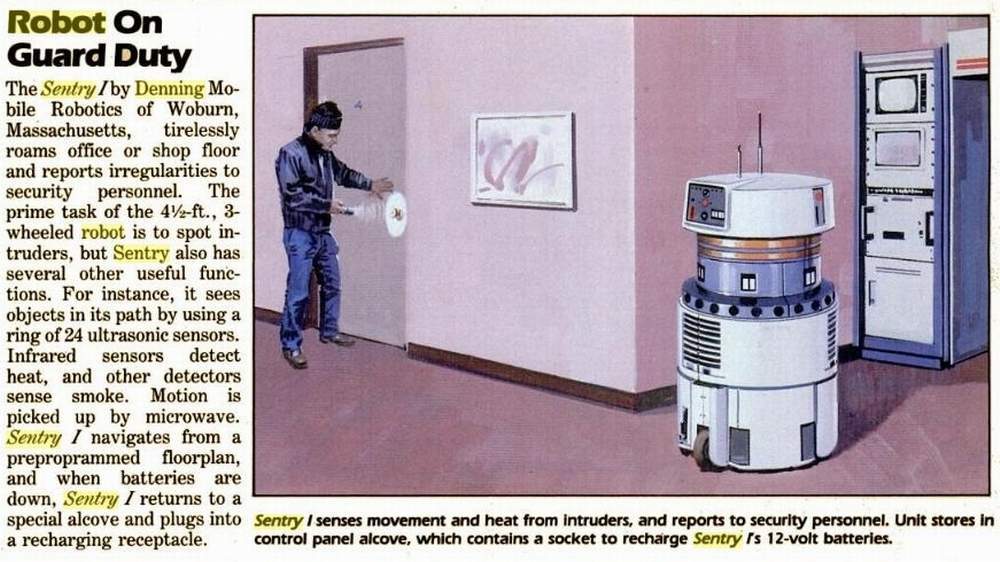
Sentry Robot by Denning. Development of the Denning Sentry as an indoor security robot by Denning Mobile Robots of Woburn, MA began in August of 1983. A navigational system based on pre-determined paths marked by near-infrared optical beacons affixed to walls at the end of each path segment proved more than adequate to get the system up and running in very structured environments. The incorporation of recently introduced Polaroid ultrasonic rangefinders improved the navigational solution by allowing the robot to measure its offset as it approached a wall structure, while simultaneously supporting a fairly robust obstacle detection capability. More importantly, the ranging sensors facilitated later development of a powerful wall-following algorithm that reduced dependence on the optical beacon system, increasing flexibility in the event of required path changes and reducing the need to modify the robot s environment.