AstroBot project at NASA Goddard Space Flight Center through NASA Mike's ( Michael Comberiate ) Robot Boot Camp.
AstroBot 2011 Design Team : NASA Project Leader/ Mentor : Naveed Quraishi ; Design Team : Rachel McCoy - B.M.E. The Catholic University of America, 2011; Abraham Quraishi - High School Intern
AstroBot General Project Plan 2011
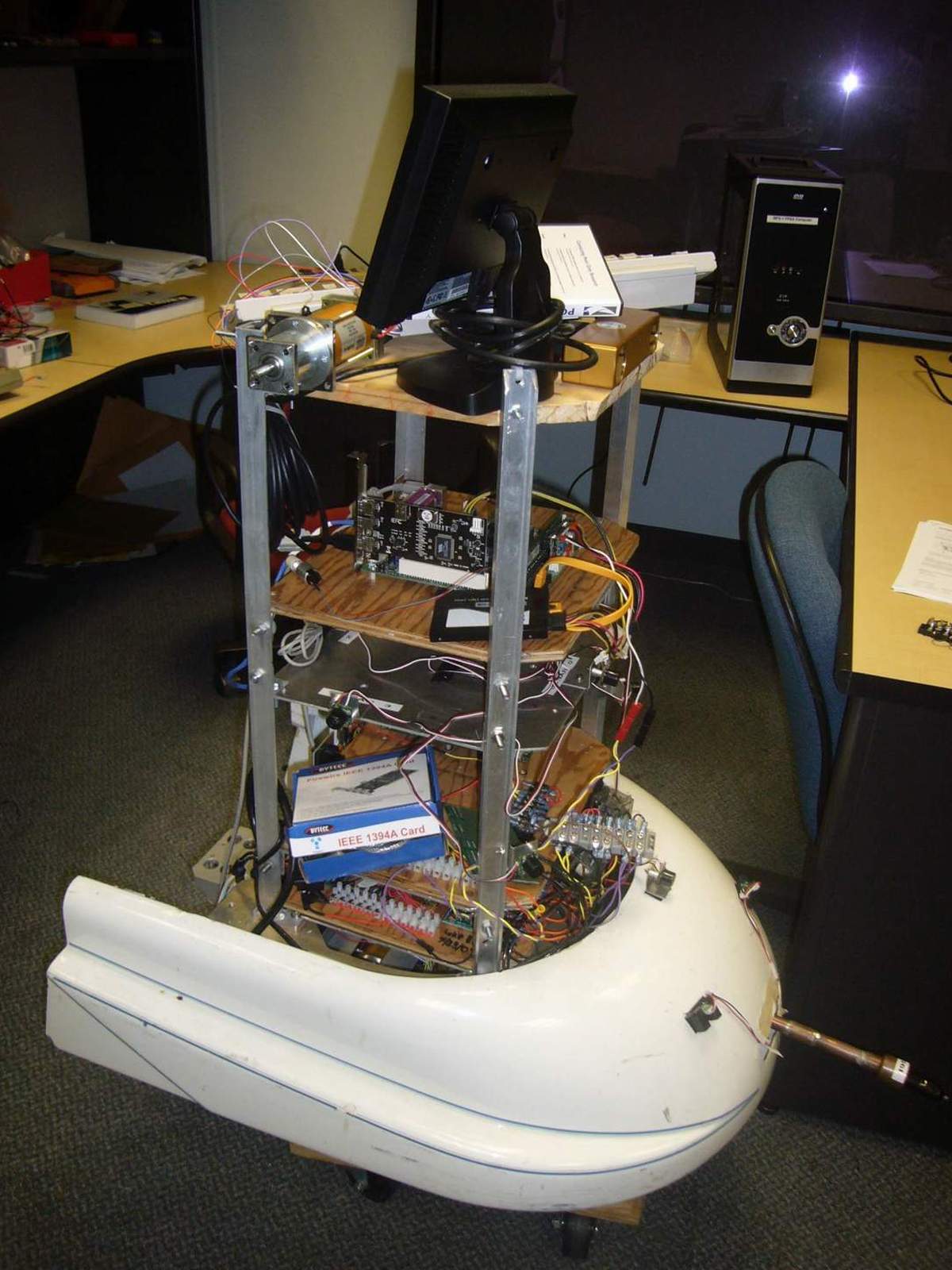
The project started with the basic foundation of an fully autonomous voice activated speaking robot that was constructed in 1992. Over the years, it had been partially disassembled and parts of many components had been scavenged for other projects. Although AstroBot has been worked on in recent years, the robot was found in poor condition in June of 2011. Using the old system layout as the general system plan, repairs and improvements will be made to the robot during the NASA Engineering Boot Camp 2011.
Goals
The main goal of the Astrobot project is to re-create the autonomous, 'intelligent' 1992 Courier Robot replacing the original components with their modern counterparts. The robot was built to resemble a human and its objective was to roam the halls of buildings and perform simple tasks including delivering mail, greeting employees, and traveling from door to door using real-time sonar mapping. Like Courier, Astrobot will use voice recognition software to understand simple commands. This is intended to be an ongoing permanent program developed to continually re grow the robotic system in semester to semester increments. As in the past, all work being done will be done in well documented packages designed to be handed off to the next group of students.
Initially, the robot will be completely dissembled. All working electronic components will be saved, new components will be ordered as necessary. The design team will rewire, restructure, and revamp AstroBot while keeping his original features (mechanical structure, astronaut shell, ect.) intact.
Once AstroBot is back to its original working state, new improvements and features will be added to the robot. Some possible additions include:
Getting the LCD digital "face" of AstroBot in working order for video conferencing or to show robotic facial features
Mail delivery system embedded in robot shell; Vacuum cleaner in lower body cavity; Improvements to obstacle avoidance capabilities; Development of a new battery charging system
AstroBot Team : Chris Gamache - Leader and Software Guru ; Jason Trinidad - In charge of Electrical / Mechanical reconstruction of AstroBot ; Kevin Hamerski - In charge of integrating Hardware and Software.Courtesy of Patrick H. Stakem a Senior Systems Engineer supporting NASA's Goddard Space Flight Center.