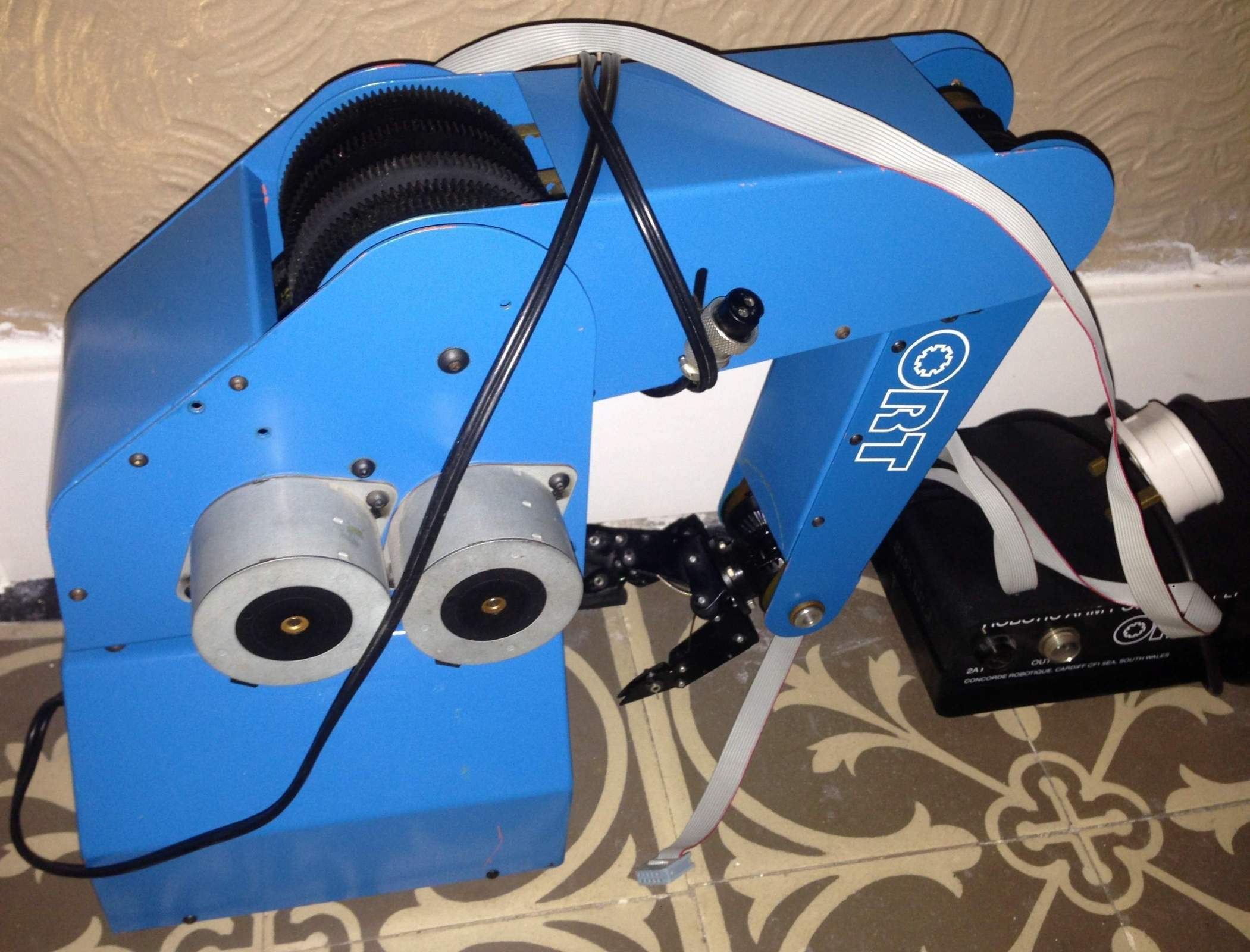
The ARMDROID I is a computer controlled manipulator with five axis of rotation and a three fingered gripper. It is a continuous path robot arm allowing all motions to be operated simultaneously. The unit can be operated under direct microcomputer keyboard control or can be taught a series of motions which can be repeated as often as desired. The rubberized three fingers can hold items of various sizes and shapes.
The ARMDROID feature is its parallelogram operation. Starting with the upper arm verticle, the forarm horizontal and the hand pointing downward, the sholder joint can be rotated and the forarm and hand will retain their orientation. The forarm can be raised and lowered and the hand will remain pointing downward. This feature can be important when picking and placing objects.