I started hacking away at it; adding new features. I added servos for the arms, so they can move now. I also made the head rotate left to right with a servo. I then added a wireless camera between its eyes (looks like a nose lol). I put a wireless microphone in its chest. I used a dual HBridge to control the standard motor and gearset.
1 x Tomy Omnibot
1 x mini wireless camera [eBay]
2 x standard servos for the arms [HVWTech]
1 x standard servo for head [HVWTech]
1 x 7.2v battery pack [HVWTech]
1 x mini servo for distance scanner sweep
1 x HC-SR04 Ultrasonic Distance Sensor
2 x QRD1114 IR Detectors for floor
1 x Sparkfun TB6612FNG HBridge Motor Controller
Development Enviroment: The hardware robot controller is the EZ-B. I used a bit of EZ-Builder for some of the demo, and the rest is a C# .Net application that uses the EZ-SDK.
Currently, the programming is a collection of functions from my other robots and more. I have added:
Voice recognition
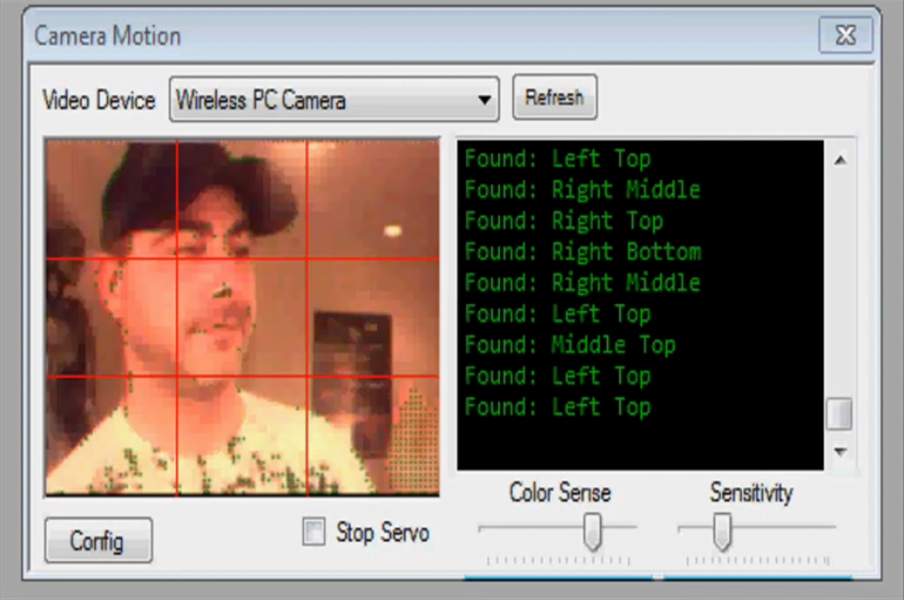
Visual recognition, color tracking, motion tracking and object tracking
Voice synthesis
Remote control
DC Motor Load Detection (Prevents getting stuck from objects he can't see)