Kermit The Robot Notes by Ron Milner
I built Kermit the robot at Cyan Engineering, Atari's secret think tank in Grass Valley CA a couple years after we designed the 2600 video game system. I was an engineer there having too much fun. The robot was a pet project for Nolan Bushnell, then still the head of Atari and a very creative guy. It's purpose in life was as Nolan put it to "bring me a beer!" Navigation for robots was a sketchy thing at that time with lots of pioneering work at MIT but no consumer cost ideas. Nolan brought us the incredibly original idea to navigate a robot (which mostly meant knowing where it was) by means of scanning bar codes attached here and there to the baseboards in the rooms the robot was to service. Why it wasn't patented I don't know.
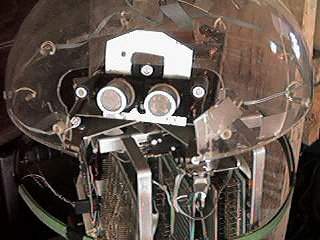
I had lots of fun building the R2D2 style robot about 20" tall. I liked to put mechanical and electronic things together and we had a great shop at Cyan. It's brain was one of the 6502 based single board computers-I think it was a KIM but not sure. Locomotion was two DC gear motor driven wheels and an instrumented caster-about the same rig as a modern Roomba. A rotatable turret covered with a plexiglass dome carried microphones, an IR sensor to detect people, and ultrasonic ranging sensors I built on a separate PC board. A speaker so Kermit could beep gleefully, of course.
A ring of contact-detecting burglar alarm sensing tape (green in the pictures) around Kermit's middle told the software he had hit something and should back off. The ultrasonics provided range to obstacles and to some extent direction as the turret was rotated, so we could go around things.
My pride and joy was the barcode remote scanner which was mounted on the bottom of the robot so its rotating head would be level with the barcodes on the baseboards. It had a vertical telescope tube with a beam splitter between the IR Led and the photodiode sensor and a lens to focus 2-20'away. It aimed down at a front surface mirror at 45 degree to scan horizontally. The mirror was mounted on a motor driven turret so it spun around continuously with a sensor once around to resolve the continuous angular position of the beam horizontally of course with respect to Kermit's rotational position. Unfortunately, this part of the robot did not survive the closing of our group. The barcodes I made for the prototype to detect were about 4" tall made of 3/4" reflective 3m tape on black poster board.
My programming partner on the project was Larry Nicholson, a really bright guy. He made the barcode reading work to detect not only the barcodes, but where they were angularly with respect to the robot and also their subtended angle or apparent size (all from timing of the rotation of the scanner) which was a measure of distance combined with angle from the barcode. We worked out some pretty clever math to resolve that information from two or three of the barcodes into a position and orientation of Kermit in the room. We had rented an empty room upstairs on the third floor of the Litton building to try all this out and work out the navigation. Larry and I got the basic navigation and obstacle avoidance working so Kermit could go from one place to a designated other place in the room and avoid wastebaskets placed randomly. We demonstrated it to Nolan and he was impressed.
Shortly thereafter Warner Communication who had bought Atari from Nolan kicked him out and the Kermit project was cancelled. I don't remember the timing but I stashed Kermit in my home attic for years before finally giving it to Owen Rubin who played around with all of it except the bar code reader. I probably stashed that part someplace else where it eventually got dismantled.
By this time, Nolan's beer had gotten not only warm, but probably flat as well. . . . . . . Fin
Kermit The Robot Notes by Owen R. Rubin
Kermit was originally built by Atari's Engineering Group in Grass Valley, California. Kermit was abandoned in the Sunnyvale offices. Some electronic work to make it run again was needed and some new software was written to make it do different things. As you can see, he is not in the best shape right now. It will power up and one motor has gone bad, and the sensors are out again. He also took a spill down the stairs at Atari in his last few days and it cracked his head, a plastic bowl, and broke a bunch of the bulbs in the head dome.
My appreciation to Ron Milner / Owen R. Rubin. See this link: http://www.orubin.com/